  |
| Politica de confidentialitate |
|
|
| • domnisoara hus • legume • istoria unui galban • metanol • recapitulare • profitul • caract • comentariu liric • radiolocatia • praslea cel voinic si merele da aur | |
GENERALIZAREA RELATIILOR DE CALCUL A ERORILOR DE ORIENTARE A PIESELOR DUPA DOUA SUPRAFETE CILINDRICE
1. Generalizarea relatiilor de calcul a erorilor de orientare a unei piese
dupa suprafete cilindrice.
1.1. Generalizarea relatiilor de calcul a erorilor de orientare a unei piese
dupa doua suprafete cilindrice exterioare fata de un plan fix.
Scopul principal al studiului efectuat este acela de stabilire a relatiilor de calcul generalizate pentru determinarea erorii limita de orientare a pieselor este de a pune la dispozitia cercetatorilor si a proiectantilor de dispozitive de asamblare un model de analiza si de calcul, care sa permita stabilirea anticipata a erorii limita de orientare. In felul acesta, va deveni posibila orientarea corecta, cu mai mare usurinta, a conceptiei, executiei, intretinerii si folosirii rationale a metodelor si mijloacelor de proiectare , astfel incat eroarea limita de orientare a pieselor sa nu depaseasca valoarea admisibila din toleranta prescrisa la parametrul (parametrii) suprafetelor omoloage de asamblare.
Necesitatea determinarii erorii limita de orientare decurge si de faptul potrivit caruia marimea erorii de orientare influenteaza asupra pozitiei relative a suprafetelor conjugate ale pieselor ce se asambleaza.
In scopul de a se asigura metodologiei si relatiilor de calcul, caracterul de maxima generalitate, in sensul ca acestea sa fie valabile indiferent de sistemul de referinta ales s-a procedat in prima faza la stabilirea relatiilor de calcul a valorilor erorilor de orientare pentru principalele pozitii pe care le poate ocupa piesa fata de sistemul de referinta ales si in final s-au determinat relatiile generalizate de calcul a erorilor de orientare.
In baza relatiilor de calcul a valorilor erorilor de orientare a unei piese dupa doua suprafete cilindrice exterioare, prezentate la subcapitolul 3.2.2, s-au dedus relatiile generalizate de calcul a valorilor erorilor de orientare a unei piese dupa doua suprafete cilindrice exterioare fata de un plan fix, erori raportate la pozitia de referinta aleasa si fata de cele doua sisteme de coordonate X1O1Y1 respectiv X2O2Y2 ; relatii care vor fi prezentate in continuare.
De data aceasta, in scopul generalizarii relatiilor de calcul a erorilor de orientare se considera (figura 1):
![]() - distanta dintre axele celor
doua suprafete cilindrice exterioare si reprezinta dupa caz: Amin
; A ; Amax sau oricare valoare
cuprinsa intre valoarea minima si cea maxima;
- distanta dintre axele celor
doua suprafete cilindrice exterioare si reprezinta dupa caz: Amin
; A ; Amax sau oricare valoare
cuprinsa intre valoarea minima si cea maxima;
![]() - diametrul suprafetei
cilindrice exterioare S1di si reprezinta dupa caz:
- diametrul suprafetei
cilindrice exterioare S1di si reprezinta dupa caz:
d1min ; d1 ; d1max sau oricare valoare cuprinsa intre valoarea minima si cea maxima;
![]() - diametrul suprafetei
cilindrice exterioare S2di si reprezinta dupa caz:
- diametrul suprafetei
cilindrice exterioare S2di si reprezinta dupa caz:
d2min ; d2 ; d2max sau oricare valoare cuprinsa intre valoarea minima si cea maxima;
S1di - suprafata cilindrica exterioara S1di si reprezinta dupa caz: S1min ; S10 ; S1max sau oricare valoare cuprinsa intre valoarea minima si cea maxima;
S2di - suprafata cilindrica exterioara S2di si reprezinta dupa caz: S2min ; S20 ; S2max sau oricare valoare cuprinsa intre valoarea minima si cea maxima.
Piesele pot lua valori in urmatoarele intervale:
![]() , (1)
, (1)
![]() , (2)
, (2)
![]() , (3)
, (3)
Avand in vedere aceste considerente si prin substituirile de mai sus in relatiile obtinute la capitolul 3.2.2; relatiile generalizate de calcul a erorilor de orientare a unei piese dupa doua suprafete cilindrice exterioare fata de un plan fix pot fi scrise dupa cum urmeaza:
Coordonatele centrelor celor doua suprafete cilindrice
exterioare ![]() respectiv
respectiv ![]() raportate la pozitia de referinta a centrelor celor doua suprafete
raportate la pozitia de referinta a centrelor celor doua suprafete ![]() respectiv
respectiv ![]() in sistemele de coordonate
in sistemele de coordonate ![]() respectiv
respectiv ![]() sunt:
sunt:
![]() respectiv
respectiv ![]()
in care:
![]() , (4)
, (4)
Fig.1. Orientarea unei piese dupa doua suprafete cilindrice exterioare
fata de un plan fix. Reprezentare generala.
 , (5)
, (5)
![]() , (6)
, (6)
 , (7)
, (7)
Erorile de orientare a centrelor celor doua suprafete S1di respectiv S2di raportate la pozitia de referinta si fata de cele doua sisteme de coordonate X1O1Y1 respectiv X2O2Y2 sunt date de relatiile urmatoare:
 (8)
(8)
 (9)
(9)
1.2. Generalizarea relatiilor de calcul a erorilor de orientare a unei piese
dupa doua suprafete cilindrice exterioare fata de o prisma fixa
In baza relatiilor de calcul a valorilor erorilor de orientare a unei piese dupa doua suprafete cilindrice exterioare, prezentate la subcapitolul 3.3.2, s-au dedus relatiile generalizate de calcul a valorilor erorilor de orientare a unei piese dupa doua suprafete cilindrice exterioare fata de o prisma fixa, erori raportate la pozitia de referinta aleasa si fata de cele doua sisteme de coordonate X1O1Y1 respectiv X2O2Y2 ; relatii care vor fi prezentate in continuare.
De data aceasta, in scopul generalizarii relatiilor de calcul a erorilor de orientare se considera (figura 2):
fata de o prisma fixa. Reprezentare generala.
![]() - distanta dintre axele
celor doua suprafete cilindrice exterioare si reprezinta dupa caz: Amin
; A ; Amax
sau oricare valoare cuprinsa intre valoarea minima si cea maxima;
- distanta dintre axele
celor doua suprafete cilindrice exterioare si reprezinta dupa caz: Amin
; A ; Amax
sau oricare valoare cuprinsa intre valoarea minima si cea maxima;
![]() - diametrul suprafetei
cilindrice exterioare S1di si reprezinta dupa caz:
- diametrul suprafetei
cilindrice exterioare S1di si reprezinta dupa caz:
d1min ; d1 ; d1max sau oricare valoare cuprinsa intre valoarea minima si cea maxima;
![]() - diametrul suprafetei
cilindrice exterioare S2di si reprezinta dupa caz:
- diametrul suprafetei
cilindrice exterioare S2di si reprezinta dupa caz:
d2min ; d2 ; d2max sau oricare valoare cuprinsa intre valoarea minima si cea maxima;
S1di - suprafata cilindrica exterioara S1di si reprezinta dupa caz: S1min ; S10 ; S1max sau oricare valoare cuprinsa intre valoarea minima si cea maxima;
S2di - suprafata cilindrica exterioara S2di si reprezinta dupa caz: S2min ; S20 ; S2max sau oricare valoare cuprinsa intre valoarea minima si cea maxima.
Piesele pot lua valori in urmatoarele intervale:
![]() , (10)
, (10)
![]() , (11)
, (11)
![]() , (12)
, (12)
Avand in vedere aceste considerente si prin substituirile de mai sus in relatiile obtinute la subcapitolul 3.3.2; relatiile generalizate de calcul a erorilor de orientare a unei piese dupa doua suprafete cilindrice exterioare fata de o prisma fixa pot fi scrise dupa cum urmeaza:
Coordonatele centrelor celor doua suprafete cilindrice
exterioare ![]() respectiv
respectiv ![]() raportate la pozitia de referinta a centrelor celor doua suprafete
raportate la pozitia de referinta a centrelor celor doua suprafete ![]() respectiv
respectiv ![]() in sistemele de coordonate
in sistemele de coordonate ![]() respectiv
respectiv ![]() sunt:
sunt:
![]() respectiv
respectiv ![]()
in care:
 , (13)
, (13)
 (14)
(14)
 , (15)
, (15)
 , (16)
, (16)
Erorile de orientare a centrelor celor doua suprafete S1di respectiv S2di raportate la pozitia de referinta si fata de cele doua sisteme de coordonate X1O1Y1 respectiv X2O2Y2 sunt date de relatiile urmatoare:
 (17)
(17)
 , (18)
, (18)
Generalizarea relatiilor de calcul a erorilor de orientare a unei
piese dupa doua suprafete cilindrice interioare fata de doua
dornuri de orientare.
In baza relatiilor de calcul a valorilor erorilor de orientare a unei piese dupa doua suprafete cilindrice interioare, prezentate la subcapitolul 4.2.2, s-au dedus relatiile generalizate de calcul a valorilor erorilor de orientare a unei piese dupa doua suprafete cilindrice interioare fata de doua dornuri de orientare, erori raportate la pozitia de referinta aleasa si fata de cele doua sisteme de coordonate X1O1Y1 respectiv X2O2Y2 ; relatii care vor fi prezentate in continuare.
De data aceasta, in scopul generalizarii relatiilor de calcul a erorilor de orientare se considera (figura 3):
![]() - distanta dintre axele celor
doua suprafete cilindrice inxterioare si reprezinta dupa caz: Amin
; A ; Amax sau oricare valoare
cuprinsa intre valoarea minima si cea maxima;
- distanta dintre axele celor
doua suprafete cilindrice inxterioare si reprezinta dupa caz: Amin
; A ; Amax sau oricare valoare
cuprinsa intre valoarea minima si cea maxima;
![]() - diametrul suprafetei cilindrice interioare
S1Di si reprezinta dupa caz:
- diametrul suprafetei cilindrice interioare
S1Di si reprezinta dupa caz:
D1min ; D1 ; D1max sau oricare valoare cuprinsa intre valoarea minima si cea maxima;
![]() - diametrul suprafetei cilindrice interioare
S2Di si reprezinta dupa caz:
- diametrul suprafetei cilindrice interioare
S2Di si reprezinta dupa caz:
D2min ; D2 ; D2max sau oricare valoare cuprinsa intre valoarea minima si cea maxima;
S1Di - suprafata cilindrica interioara S1Di si reprezinta dupa caz: S1min ; S10 ; S1max sau oricare valoare cuprinsa intre valoarea minima si cea maxima;
S2Di - suprafata cilindrica exterioara S2Di si reprezinta dupa caz: S2min ; S20 ; S2max sau oricare valoare cuprinsa intre valoarea minima si cea maxima.
Pieselor pot lua valori in urmatoarele intervale:
![]() , (19)
, (19)
![]() , (20)
, (20)
 , (21)
, (21)
Fig. 3. Orientarea unei piese dupa doua suprafete cilindrice interioare
fata de doua dornuri de orientare. Reprezentare generala.
Avand in vedere aceste considerente si
prin substituirile de mai sus in relatiile obtinute la capitolul 4.2.2; relatiile
generalizate de calcul a erorilor de orientare a unei piese dupa doua suprafete
cilindrice interioare fata de doua dornuri de orientare pot fi scrise dupa cum urmeaza: Coordonatele centrelor celor doua
suprafete cilindrice interioare ![]() respectiv
respectiv ![]() raportate la pozitia de referinta a centrelor celor doua suprafete
raportate la pozitia de referinta a centrelor celor doua suprafete ![]() respectiv
respectiv ![]() in sistemele de coordonate
in sistemele de coordonate ![]() respectiv
respectiv ![]() sunt:
sunt:
![]() respectiv
respectiv ![]()
in care:
 , (22)
, (22)
 (23)
(23)
 , (24)
, (24)
 (25)
(25)
Erorile de orientare a centrelor celor doua suprafete S1Di respectiv S2Di raportate la pozitia de referinta si fata de cele doua sisteme de coordonate X1O1Y1 respectiv X2O2Y2 sunt date de relatiile urmatoare:
![]() , (26)
, (26)
![]() , (27)
, (27)
In baza relatiilor generalizate de calcul a valorilor erorilor de orientarea a unei piese dupa doua suprafete cilindrice (exterioare sau interioare) s-au elaborat programe speciale de calcul care vor fi prezentate in continuare.
2. Elaborarea programelor de calcul a valorilor erorilor de orientare.
Pentru determinarea operativa a valorilor erorilor de orientare a pieselor dupa doua suprafete cilindrice exterioare sau interioare avand la baza relatiile generalizate de calcul ale acestora, se pot elabora programe de calcul pentru lucrul pe calculator folosind unul din limbajele de programare cunoscute (Excel, FORTRAN, C, C++, PASCAL, VISUAL C++, etc).
Avand in vedere ca majoritatea specialistilor in domeniu utilizeaza pe scara larga programul Excel s-a constatat ca utilizand softul acestui program se pot determina in conditii optime valorile erorilor de orientare a pieselor dupa doua suprafete cilindrice avand la baza relatiile generalizate de calcul determinate mai sus si in aceste conditii au fost elaborate programele de calcul pentru cele trei cazuri de orientare a pieselor analizate la capitolele 3 si 4.
Pentru fiecare caz de orientare a pieselor dupa doua suprafete cilindrice, studiat la capitolele anterioare, s-a elaborat cate un program de calcul care va fi prezentat in continuare.
2.1. Elaborarea programelor de calcul a valorilor erorilor de orientare a unei piese dupa doua suprafete cilindrice exterioare fata de un plan fix.
Imaginea ferestrei de lucru a calculatorului corespunzatoare aplicatiei facute pe piesa reprezentativa pentru calculul valorilor erorilor de orientare a unei piese dupa doua suprafete cilindrice exterioare fata de un plan fix este prezentata in figura 4.
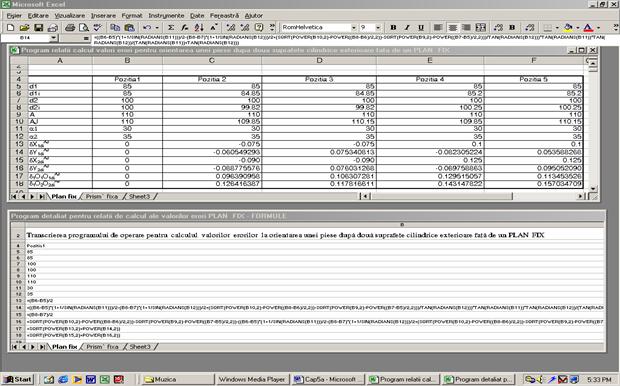
Fig. 4. Imaginea ferestrei de lucru a calculatorului pentru calculul erorilor de orientare a unei piese
dupa doua suprafete cilindrice exterioare fata de un plan fix
Pentru prezentarea pe scurt a programului elaborat (figura 4) in tabelul 1 s-a detaliat programul de operare (in limbajul calculatorului) pentru calculul valorilor erorilor de orientare a unei piese dupa doua suprafete cilindrice exterioare fata de un plan fix fiind pusi in evidenta atat parametrii de intrare cat si cei de iesire.
Tabelul 1 Detalierea programului de calcul a valorilor erorilor de orientare a unei piese dupa
doua suprafete cilindrice exterioare fata de un plan fix.
|
|
A |
B |
Exemplu |
|||
|
Parametrii de intrare (se introduc de catre operator) |
||||||
|
|
|
Pozitia . |
Pozitia 2 |
|||
|
|
d1 |
Valoarea de referinta a diametrului suprafetei cilindrice exterioare S1 |
|
|||
|
|
d1i |
Valoarea diametrului corespunzatoare pozitiei analizate pentru suprafata S1 |
|
|||
|
|
d2 |
Valoarea de referinta a diametrului suprafetei cilindrice exterioare S2 |
|
|||
|
|
d2i |
Valoarea diametrului corespunzatoare pozitiei analizate pentru suprafata S2 |
|
|||
|
|
A |
Valoarea de referinta a distantei dintrei centrele celor doua suprafete cilindrice exterioare. |
|
|||
|
|
AJ |
Valoarea distantei dintrei centrele celor doua suprafete cilindrice exterioare corespunzatoare pozitiei analizate. |
|
|||
|
|
|
Unghiul prismei corespunzator suprafetei cilindrice exterioare S1 |
|
|||
|
|
|
Unghiul prismei corespunzator suprafetei cilindrice exterioare S2 |
|
|||
|
Descrierea programului de calcul in limbajul calculatorului (calculele se efectueaza automat) |
Rezultate |
|||||
|
|
X1diAJ |
=(B6-B5)/2 |
|
|||
|
|
Y1diAJ |
=((B6-B5)*(1+1/SIN(RADIANS(B11)))/2-(B8-7)*(1+1/SIN(RADIANS(B12)))/2+ (SQRT(POWER(B10,2)-POWER((B8-B6)/2,2))-SQRT(POWER(B9,2)-POWER ((B7-5)/2,2)))/TAN(RADIANS(B12)))*TAN(RADIANS(B11))*TAN(RADIANS (B12))/(TAN(RADIANS(B11))+TAN(RADIANS(B12))) |
|
|||
|
|
X2diAJ |
=(B8-B7)/2 |
|
|||
|
|
Y2diAJ |
=SQRT(POWER(B10,2)-POWER((B8-B6)/2,2))-SQRT(POWER(B9,2)-POWER ((B7- B5)/2,2))-((B6-B5))*(1+1/SIN(RADIANS(B11))))/2-(B8-B7)*(1+1/SIN (RADIANS(B12)))/2+(SQRT(POWER(B10,2)-POWER((B8-B6)/2,2))-SQRT (POWER(B9,2)-POWER((B7-B5)/2,2)))/TAN(RADIANS(B12)))*TAN (RADIANS(B11))*TAN(RADIANS(B12))/(TAN(RADIANS(B11))+ TAN(RADIANS(B12))) |
|
|||
|
|
1O1O1diAJ |
=SQRT(POWER(B13,2)+POWER(B14,2)) |
|
|||
|
|
1O2O2diAJ |
=SQRT(POWER(B15,2)+POWER(B16,2)) |
|
|||
In fiecare celula din tabelul prezentat in fereastra de lucru
a calculatorului (figura 4) si in
tabelul 1 sunt trecute datele de intrare si cele de iesire legate de programul
de calcul, astfel in coloana A randurile 5 . 12 sunt inseriati parametrii de intrare (d1;
d1i; d2; d2di; A; Aj; 1;
2), iar in randurile 13 . 18 sunt trecuti parametrii de iesire
(coordonatele ![]() ;
; ![]() ;
; ![]() si
si ![]() respectiv erorile de
orientare a centrelor celor doua suprafete cilindrice exterioare
respectiv erorile de
orientare a centrelor celor doua suprafete cilindrice exterioare ![]() si
si ![]() ).
).
In coloanele B (corespunzatoare pozitiei de
referinta - Pozitia 1); C; D; E si F (corespunzatoare pozitiilor 2 . 5) se
introduc de catre operator valorile parametrilor de intrare (d1; d1i; d2;
d2di; A; Aj; 1; 2) in
randurile corespunzatoare (5 . 12) si in baza programului elaborat calculatorul
afiseaza automat in randurile corespunzatoare (13 . 18) valorile parametrilor
de iesire (coordonatele ![]() ;
; ![]() ;
; ![]() si
si ![]() respectiv erorile de
orientare a centrelor celor doua suprafete cilindrice exterioare
respectiv erorile de
orientare a centrelor celor doua suprafete cilindrice exterioare ![]() si
si ![]() ).
).
Simbolurile utilizate pentru parametrii de intrare cat si pentru cei de iesire au semnificatiile prezentate la subcapitolul 1.1.
Programul de lucru (in limbajul calculatorului) este prezentat detaliat (numai pozitia1) pentru fiecare parametru de iesire in randul corespunzator din tabelul respectiv (tabelul 1); pentru restul pozitiilor programul se prezinta asemanator cu cel pentru pozitia 1 cu precizarea ca se modifica numai indicele corespunzator coloanei pozitiei respective.
In tabelul 1 in ultima coloana sunt trecute rezultatele obtinute pentru una din pozitiile de orientare a piesei (pozitia 2).
In continuare se prezinta un exemplu de transcriere a unei relatii de calcul in limbajul calculatorului:
Se considera relatia  care in limbajul de lucru al
calculatorului (Excel) pentru pozitia 1devine:
care in limbajul de lucru al
calculatorului (Excel) pentru pozitia 1devine:
|
Y1d0A0=((B6-B5)*(1+1/SIN(RADIANS(B11)))/2-(B8-7)*(1+1/SIN(RADIANS(B12)))/2+ (SQRT(POWER(B10,2)-POWER((B8-B6)/2,2))-SQRT(POWER(B9,2)-POWER ((B7-5)/2,2)))/TAN(RADIANS(B12)))*TAN(RADIANS(B11))*TAN(RADIANS (B12))/(TAN(RADIANS(B11))+TAN(RADIANS(B12))) |
Programul elaborat permite selectarea rapida a valorilor obtinute cu precizia dorita (numarul zecimalelor poate fi setat cu usurinta din meniul de lucru al calculatorului); insa la stabilirea datelor finale se recomanda alegerea valorilor de iesire cu maxim trei zecimale (rezultand in acest caz valori de ordinul micronilor).
2.2. Elaborarea programelor de calcul a valorilor erorilor de orientare a unei
piese dupa doua suprafete cilindrice exterioare fata de o prisma fixa.
Imaginea ferestrei de lucru a calculatorului corespunzatoare aplicatiei facute pe piesa reprezentativa pentru calculul valorilor erorilor de orientare a unei piese dupa doua suprafete cilindrice exterioare fata de o prisma fixa este prezentata in figura
Pentru prezentarea pe scurt a programului elaborat (figura 5) in tabelul 2 s-a detaliat programul de operare (in limbajul calculatorului) pentru calculul valorilor erorilor de orientare a unei piese dupa doua suprafete cilindrice exterioare fata de o prisma fixa fiind pusi in evidenta atat parametrii de intrare cat si cei de iesire.
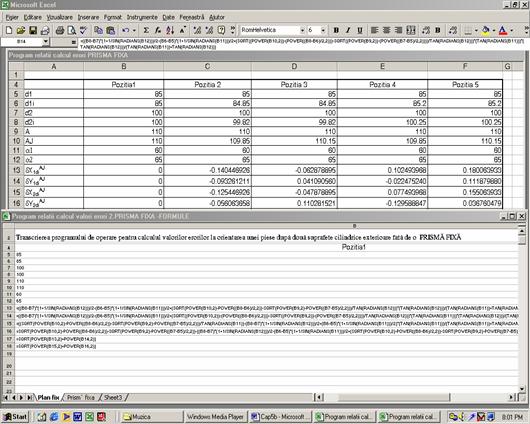
Fig. Imaginea ferestrei de lucru a calculatorului pentru calculul erorilor de orientare a unei piese
dupa doua suprafete cilindrice exterioare fata de o prisma fixa.
Tabelul 2 Detalierea programului de calcul a valorilor erorilor de orientare a unei piese
dupa doua suprafete cilindrice exterioare fata de o prisma fixa.
|
|
A |
B |
Exemplu |
|
|
Parametrii de intrare (se introduc de catre operator) |
||||
|
|
|
Pozitia . |
Pozitia 2 |
|
|
|
d1 |
Valoarea de referinta a diametrului suprafetei cilindrice exterioare S1 |
|
|
|
|
d1i |
Valoarea diametrului corespunzatoare pozitiei analizate pentru suprafata S1 |
|
|
|
|
d2 |
Valoarea de referinta a diametrului suprafetei cilindrice exterioare S2 |
|
|
|
|
d2i |
Valoarea diametrului corespunzatoare pozitiei analizate pentru suprafata S2 |
|
|
|
|
A |
Valoarea de referinta a distantei dintrei centrele celor doua suprafete cilindrice exterioare. |
|
|
|
|
AJ |
Valoarea distantei dintrei centrele celor doua suprafete cilindrice exterioare corespunzatoare pozitiei analizate. |
|
|
|
|
|
Unghiul prismei corespunzator suprafetei cilindrice exterioare S1 |
|
|
|
|
|
Unghiul prismei corespunzator suprafetei cilindrice exterioare S2 |
|
|
|
Descrierea programului de calcul in limbajul calculatorului (calculele se efectueaza automat) |
Rezultate |
|||
|
|
X1diAJ |
=((B8-B7)*(1+1/SIN(RADIANS(B12)))/2-(B6-B5)*(1+1/SIN(RADIANS(B11)))/2+ (SQRT(POWER(B10,2)-POWER((B8-B6)/2,2))-SQRT(POWER(B9,2)-POWER((B7-B5)/2,2)))/TAN(RADIANS(B12)))*(TAN(RADIANS(B12)))/(TAN(RADIANS(B11))+TAN(RADIANS(B12)))+(B6-B5)/(2*SIN(RADIANS(B11))) |
|
|
|
|
Y1diAJ |
=((B8-B7)*(1+1/SIN(RADIANS(B12)))/2-(B6-B5)*(1+1/SIN(RADIANS(B11)))/2+ (SQRT((POWER(B10,2))-(POWER((B8-B6)/2,2)))-SQRT((POWER(B9,2))-(POWER((B7-B5)/2,2))))/TAN(RADIANS(B12)))*(TAN(RADIANS(B11)))*(TAN(RADIANS(B12)))/(TAN(RADIANS(B11))+TAN(RADIANS(B12))) |
|
|
|
|
X2diAJ |
=((SQRT(POWER(B10,2)-POWER((B8-B6)/2,2))-SQRT(POWER(B9,2)-POWER((B7-B5)/2,2)))/TAN(RADIANS(B11))-(B8-B7)*(1+1/SIN(RADIANS(B12)))/2+(B6-B5)*(1+ 1/SIN(RADIANS(B11)))/2)*(TAN(RADIANS(B11)))/(TAN(RADIANS(B11))+TAN(RADIANS(B12)))+(B8-B7)/(2*SIN(RADIANS(B12))) |
|
|
|
|
Y2diAJ |
=SQRT(POWER(B10,2)-POWER((B8-B6)/2,2))-SQRT(POWER(B9,2)-POWER((B7-B5)/2,2))-((B8-B7)*(1+1/SIN(RADIANS(B12)))/2-(B6-B5)*(1+1/SIN(RADIANS(B11)))/2+ (SQRT(POWER(B10,2)-POWER(B8-B6)/2,2))-SQRT(POWER(B9,2)-POWER(B7-B5)/2,2)))/TAN(RADIANS(B12)))*TAN(RADIANS(B11))*TAN(RADIANS(B12))/(TAN(RADIANS(B11))+TAN(RADIANS(B12))) |
|
|
|
|
2O1O1diAJ |
=SQRT(POWER(B13,2)+POWER(B14,2)) |
|
|
|
|
2O2O2diAJ |
=SQRT(POWER(B15,2)+POWER(B16,2)) |
|
|
In fiecare celula din tabelul prezentat in fereastra de lucru
a calculatorului (figura 5) si in
tabelul 2 sunt trecute datele de intrare si cele de iesire legate de programul
de calcul, astfel in coloana A randurile 5 . 12 sunt inseriati parametrii de
intrare (d1; d1i; d2; d2i; A; Aj;
1; 2), iar in randurile 13 . 18 sunt
trecuti parametrii de iesire (coordonatele ![]() ;
; ![]()
![]() si
si ![]() respectiv erorile de orientare a centrelor
celor doua suprafete cilindrice exterioare
respectiv erorile de orientare a centrelor
celor doua suprafete cilindrice exterioare ![]() si
si ![]()
In coloanele B (corespunzatoare pozitiei
de referinta - Pozitia 1); C; D; E si F (corespunzatoare pozitiilor 2 . 5) se
introduc de catre operator valorile parametrilor de intrare (d1; d1i; d2;
d2di; A; Aj; 1; 2) in
randurile corespunzatoare (5 . 12) si in baza programului elaborat calculatorul
afiseaza automat in randurile corespunzatoare (13 . 18) valorile parametrilor
de iesire (coordonatele ![]() ;
; ![]() ;
; ![]() si
si ![]() respectiv erorile de
orientare a centrelor celor doua suprafete cilindrice exterioare
respectiv erorile de
orientare a centrelor celor doua suprafete cilindrice exterioare ![]() si
si ![]() ).
).
Simbolurile utilizate pentru parametrii de intrare cat si pentru cei de iesire au semnificatiile prezentate la subcapitolul 1.2.
Programul de lucru (in limbajul calculatorului) este prezentat detaliat (numai pozitia1) pentru fiecare parametru de iesire in randul corespunzator din tabelul respectiv (tabelul 2); pentru restul pozitiilor programul se prezinta asemanator cu cel pentru pozitia 1 cu precizarea ca se modifica numai indicele corespunzator coloanei pozitiei respective.
In tabelul 2 in ultima coloana sunt trecute rezultatele obtinute pentru una din pozitiile de orientare a piesei (pozitia 2).
In continuare se prezinta un exemplu de transcriere a unei relatii de calcul in limbajul calculatorului:
Se considera relatia care in limbajul de lucru al
calculatorului (Excel) pentru pozitia 1devine:
|
Y1diAJ =((B8-B7)*(1+1/SIN(RADIANS(B12)))/2-(B6-B5)*(1+1/SIN(RADIANS(B11)))/2+ (SQRT((POWER(B10,2))-(POWER((B8-B6)/2,2)))-SQRT((POWER(B9,2))-(POWER((B7-B5)/2,2))))/TAN(RADIANS(B12)))*(TAN(RADIANS(B11)))*(TAN(RADIANS(B12)))/(TAN(RADIANS(B11))+TAN(RADIANS(B12))) |
Programul elaborat permite selectarea rapida a valorilor obtinute cu precizia dorita (numarul zecimalelor poate fi setat cu usurinta din meniul de lucru al calculatorului); insa la stabilirea datelor finale se recomanda alegerea valorilor de iesire cu maxim trei zecimale (rezulta in acest caz valori de ordinul micronilor).
2.3. Elaborarea programelor de calcul a valorilor erorilor de orientare
a unei piese dupa doua suprafete cilindrice interioare fata de doua
dornuri de orientare.
Imaginea ferestrei de lucru a calculatorului corespunzatoare aplicatiei facute pe piesa reprezentativa pentru calculul valorilor erorilor de orientare a unei piese dupa doua suprafete cilindrice interioare fata de un dorn de orientare este prezentata in figura 6.
Pentru prezentarea pe scurt a programului elaborat (figura 6) in tabelul 3 s-a detaliat programul de operare (in limbajul calculatorului) pentru calculul valorilor erorilor de orientare a unei piese dupa doua suprafete cilindrice interioare fata de doua dornuri de orientare fiind pusi in evidenta atat parametrii de intrare cat si cei de iesire.
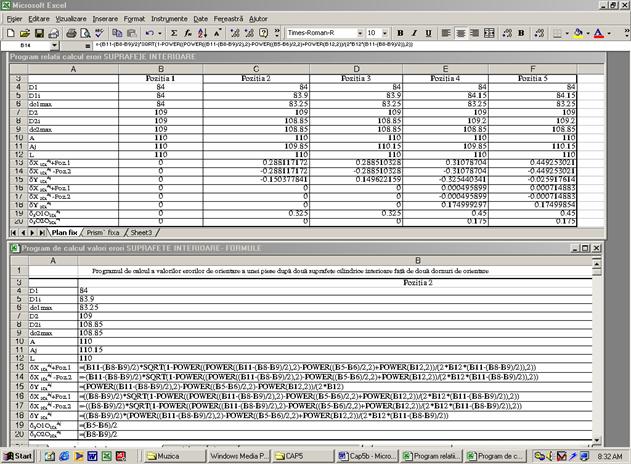
Fig. 6. Imaginea ferestrei de lucru calculatorului pentru calculul erorilor de orientare a unei piese
dupa doua suprafete cilindrice interioare fata de doua dornuri de orientare.
Tabelul 3 se prezinta sub forma urmatoare:
Tabelul 3. Programul de calcul a erorilor de orientare a unei piese dupa doua suprafete
cilindrice interioare fata de doua dornuri de orientare.
|
|
A |
B |
Exemplu |
|
Parametrii de intrare (se introduc de catre operator) |
|||
|
|
|
Pozitia . |
Pozitia 2 |
|
|
D1 |
Valoarea de referinta a diametrului suprafetei cilindrice interioare S1 |
|
|
|
D1i |
Valoarea diametrului corespunzatoare pozitiei analizate pentru suprafata S1 |
|
|
|
dc1max |
Valoarea diametrului dornului de orientare corespunzator suprafetei S1 |
|
|
|
D2 |
Valoarea de referinta a diametrului suprafetei cilindrice interioare S2 |
|
|
|
D2i |
Valoarea diametrului corespunzatoare pozitiei analizate pentru suprafata S2 |
|
|
|
dc2max |
Valoarea diametrului dornului de orientare corespunzator suprafetei S2 |
|
|
|
A |
Valoarea de referinta a distantei dintrei centrele celor doua suprafete cilindrice interioare. |
|
|
|
AJ |
Valoarea distantei dintrei centrele celor doua suprafete cilindrice exterioare corespunzatoare pozitiei analizate. |
|
|
|
L |
Valoarea de referinta a distantei dintrei centrele celor doua dornuri de orientare |
|
|
Descrierea programului de calcul in limbajul calculatorului (calculele se efectueaza automat) |
Rezultate |
||
|
|
X1DiAJ +Poz.1 |
=(B11-(B8-B9)/2)*SQRT(1-POWER((POWER((B11-(B8-B9)/2),2)-POWER((B5-B6)/2,2)+POWER(B12,2))/(2*B12*(B11-(B8-B9)/2)),2)) |
|
|
|
X1DiAJ -Poz.2 |
=-(B11-(B8-B9)/2)*SQRT(1-POWER((POWER((B11-(B8-B9)/2),2)-POWER((B5-B6)/2,2)+POWER(B12,2))/(2*B12*(B11-(B8-B9)/2)),2)) |
|
|
|
Y1DiAJ |
=(POWER((B11-(B8-B9)/2),2)-POWER((B5-B6)/2,2)-POWER(B12,2))/(2*B12) |
|
|
|
X2DiAJ +Poz.1 |
=((B8-B9)/2)*SQRT(1-POWER((POWER((B11-(B8-B9)/2),2)-POWER((B5-B6)/2,2)+POWER(B12,2))/(2*B12*(B11-(B8-B9)/2)),2)) |
|
|
|
X2DiAJ -Poz.2 |
=-((B8-B9)/2)*SQRT(1-POWER((POWER((B11-(B8-B9)/2),2)-POWER((B5-B6)/2,2)+POWER(B12,2))/(2*B12*(B11-(B8-B9)/2)),2)) |
|
|
|
Y2DiAJ |
=((B8-B9)/2)*(POWER((B11-(B8-B9)/2),2)-POWER((B5-B6)/2,2)+POWER(B12,2))/(2*B12*(B11-(B8-B9)/2)) |
|
|
|
3O1O1DiAJ |
=(B5-B6)/2 |
|
|
|
3O2O2DiAJ |
=(B8-B9)/2 |
|
In fiecare celula din tabelul prezentat in fereastra de lucru
a calculatorului (figura 6) si in
tabelul 3 sunt trecute datele de intrare si cele de iesire legate de programul
de calcul, astfel in coloana A randurile 4 . 12 sunt inseriati parametrii de
intrare (D1; D1i; dc1max ; D2; D2i;
dc2max; A; Aj; L), iar in randurile 13 . 20 sunt trecuti
parametrii de iesire (coordonatele ![]() - pozitiile 1 si 2 ;
- pozitiile 1 si 2 ; ![]()
![]() - pozitiile 1 si 2 si
- pozitiile 1 si 2 si ![]() respectiv erorile de orientare a centrelor
celor doua suprafete cilindrice interioare
respectiv erorile de orientare a centrelor
celor doua suprafete cilindrice interioare ![]() si
si ![]()
In coloanele B (corespunzatoare pozitiei
de referinta - Pozitia 1); C; D; E si F (corespunzatoare pozitiilor 2 . 5) se
introduc de catre operator valorile parametrilor de intrare (d1; d1i; d2;
d2di; A; Aj; 1; 2) in
randurile corespunzatoare (4 . 12) si in baza programului elaborat calculatorul
afiseaza automat in randurile corespunzatoare (13 . 20) valorile parametrilor
de iesire (coordonatele ![]() - pozitiile 1 si 2;
- pozitiile 1 si 2; ![]() ;
; ![]() - pozitiile 1 si 2 si
- pozitiile 1 si 2 si ![]() respectiv erorile de
orientare a centrelor celor doua suprafete cilindrice interioare
respectiv erorile de
orientare a centrelor celor doua suprafete cilindrice interioare ![]() si
si ![]() ).
).
Simbolurile utilizate pentru parametrii de intrare cat si pentru cei de iesire au semnificatiile prezentate la subcapitolul 1.3.
Programul de lucru (in limbajul calculatorului) este prezentat detaliat (numai pozitia1) pentru fiecare parametru de iesire in randul corespunzator din tabelul respectiv (tabelul 3); pentru restul pozitiilor programul se prezinta asemanator cu cel pentru pozitia 1 cu precizarea ca se modifica numai indicele corespunzator coloanei pozitiei respective.
In tabelul 3 in ultima coloana sunt trecute rezultatele obtinute pentru una din pozitiile de orientare a piesei (pozitia 2).
In continuare se prezinta un exemplu de transcriere a unei relatii de calcul in limbajul calculatorului:
Se considera relatia care in limbajul de lucru al
calculatorului (Excel) pentru pozitia 1devine:
|
Y1DiAJ=(POWER((B11-(B8-B9)/2),2)-POWER((B5-B6)/2,2)-POWER(B12,2))/(2*B12) |
Programul elaborat permite selectarea rapida a valorilor obtinute cu precizia dorita (numarul zecimalelor poate fi setat cu usurinta din meniul de lucru al calculatorului); insa la stabilirea datelor finale se recomanda alegerea valorilor de iesire cu maxim trei zecimale (rezultand in acest caz valori de ordinul micronilor).
3. CONCLUZII
Din cele prezentate mai sus se pot trage urmatoarele concluzii:
Erorile de orientare si coordonatele centrelor
celor doua suprafete cilindrice exterioare sau interioare ![]() respectiv
respectiv ![]() raportate la pozitia de referinta (pozitia 1)
a centrelor celor doua suprafete
raportate la pozitia de referinta (pozitia 1)
a centrelor celor doua suprafete ![]() respectiv
respectiv ![]() in sistemele de coordonate
in sistemele de coordonate ![]() respectiv
respectiv ![]() la orientarea fata de un plan fix ; fata de o prisma fixa respectiv fata de doua
dornuri de orientare se pot determina cu
ajutorul relatiilor generalizate prezentate mai sus pentru orice pozitie ocupata
de centrele celor doua suprafete cilindrice exterioare sau interioare definite
de:
la orientarea fata de un plan fix ; fata de o prisma fixa respectiv fata de doua
dornuri de orientare se pot determina cu
ajutorul relatiilor generalizate prezentate mai sus pentru orice pozitie ocupata
de centrele celor doua suprafete cilindrice exterioare sau interioare definite
de:
|
|
|
|
|
|
|
|
respectiv : |
|
|
|
|
|
|
Cu ajutorul programelor de calcul elaborate se pot determina operativ valorile coordonatelor centrelor celor doua suprafete cilindrice (exterioare sau interioare) fata de pozitia de referinta la orientarea fata de un plan fix, fata de o prisma fixa respectiv fata de doua dornuri de orientare;
Cu ajutorul programelor de calcul elaborate se pot alege cu usurinta parametrii elementelor de orientare (unghiurile prismelor, distanta dintre axe, diametrele dornurilor de orientare) in asa fel incat erorile de orientare sa se situeze intr-un domeniu optim din punct de vedere al preciziei de orientare pentru aplicatia dorita si gradului de automatizate impus inclusiv atunci cand se doreste utilizarea robotilor .
Utilizarea acestor rezultate permite obtinerea de economii insemnate la manopera de proiectare a dispozitivelor din cadrul sistemelor de alimentare cu piese si reducerea pretului de executie al acestora prin adoptarea unor solutii constructive adecvate;
Utilizand rezultatele teoretice si practice obtinute s-a putut stabili solutia constructiva optima pentru un dispozitiv de alimentare cu piese pentru subansamblul "Zala interioara" din componenta lanturilor folosite in industria petroliera si totodata realizarea unor familii de masini automate de asamblat zale interioare la SC INDEPENDENTA Sibiu; aplicatii care vor fi dezvoltate la capitolul 6;
Cunoasterea valorilor maxime ale erorilor de orientare a centrelor celor doua suprafete cilindrice interioare face posibila adoptarea de solutii constructive adecvate pentru piesele conjugate care participa la procesul de asamblare (tesirea sau rotunjirea muchiilor suprafetelor de asamblare, etc);
Utilizarea rezultatelor privind determinarea erorilor de orientare servesc la alegerea solutiilor optime pentru realizarea dispozitivelor de alimentare cu piese din cadrul sistemelor automate de asamblare si poate constitui punctul de plecare la stabilirea solutiilor pentru elementele de orientare si apucare ale robotilor in cazul sistemelor de asamblare robotizate.
|
|